




![]()
| →美国轻武器首页 |
FRS后备方案:双循环步枪DCR |
|
|
FRS概述 ◆ AAI XM19/XM70 ◆ DCR双循环步枪 ◆ TRW LMR ◆ 折叠弹系统 |
||
“双循环自动步枪(Dual Cycle Rifle,简称DCR)”是FRS项目实施初期的其中一种设想,其概念由美国陆军轻武器局(USASASA)的研究人员于1971年提出。该方案是实验“齐射”理论研究中,提出有两套方案,一套是高射速点射,另一套就是齐射。而DCR步枪就是对高射速点射方案的其中一种探索。
DCR步枪的新颖之处,在于它打破了一般常规自动武器上“发射一发弹,抽一次壳,同时再装入另一发弹”的传统观念。其基本出发点是,自动武器的“发射”和“开锁/再装填”这两个基本动作可用截然不同的速率进行。由此既能使自动步枪以极高的射速实施点射,又避免工作部件高速运动,从而延长武器的寿命。因为实施高射速点射的步枪在设计上就存在着两个互相矛盾的要求:
为了使弹头合理散布保持在一个适当的范围内,必须大大提高射速;
为了确保武器机构部件的可靠性和寿命,必须尽可能地降低运动部件的速度。
显然,采用常规步枪的结构是无法同时达到这两个互相矛盾的要求的。而正是这些问题困扰着SPIW计划的原型枪,对于正在进行的FRS项目中,也必然有同样的问题存在。所以陆军轻武器局就提出了DCR的设想,期望能通过实现“双循环自动方式”,解决FRS原型枪中存在的问题。
当DCR步枪的设想提出后,有多家美国公司先后提出不少具体设计方案,通过研究,否决了重量太大的多枪管方案,最终只选出两种方案进行继续研究。而且虽然DCR是作为FRS的备选方案之一,但决定先研制发射普通弹的原型枪进行试验,避免在预选武器方案的阶段又同时研制新弹药,如果DCR原理成功实现,再考虑研制其他弹药的步枪。这两种方案有以下一些共同点:
采用一根枪管和转轮式弹膛的设计;
都只能进行3发点射。如果研制成功,再研制具有快慢机功能的步枪;
都采用3排排列的弹匣供弹,所以一次能同时供入3发弹;
点射理论射速为4500发/分;
“发射”循环中,参与运动的部件较轻,行程也相当短。而在“开锁/再装填”循环中,由于重量较大的部件参与运动,其行程又很长,所以动作机构的运动速度大幅降低。
这两种方案的枪在装填后全重都在3.2~4.1kg之间。
其中,方案A采用有3个弹膛的非对称转轮。在 “发射”和“开锁”过程中,自动机一直持续向后运动。每发弹发射后,火药气体能量都传递给自动机。从装填和武器待发开始,整个自动循环如下:
击发1号弹(利用弹簧储存的能量);
推自动机向后(利用火药气体能量);
将2号弹送至发射位置,并使击针待发(利用自动机之动能);
击发2号弹(自动机仍在向后运动,但此时位于凸轮导槽的同心部分);
将3号弹定位于发射位置,击针待发;
击发3号弹;
弹膛开启(即开锁),进行抽壳和装填(自动机与附加的运动部件合并在一起运动,质量增加,速度下降);
同时抽出3发空弹壳;
自动机受缓冲器作用停止向后运动;
自动机复进(利用弹簧储存的能量);
从弹匣中同时取出3发弹;
抛壳(向前抛壳);
1号弹定位于发射位置,自动机闭锁,枪再次待发,准备进行下一次点射。
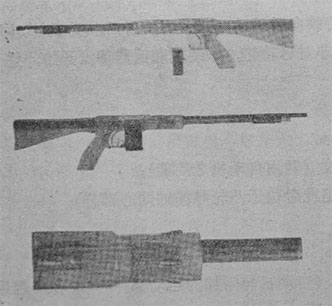
方案A的原型枪
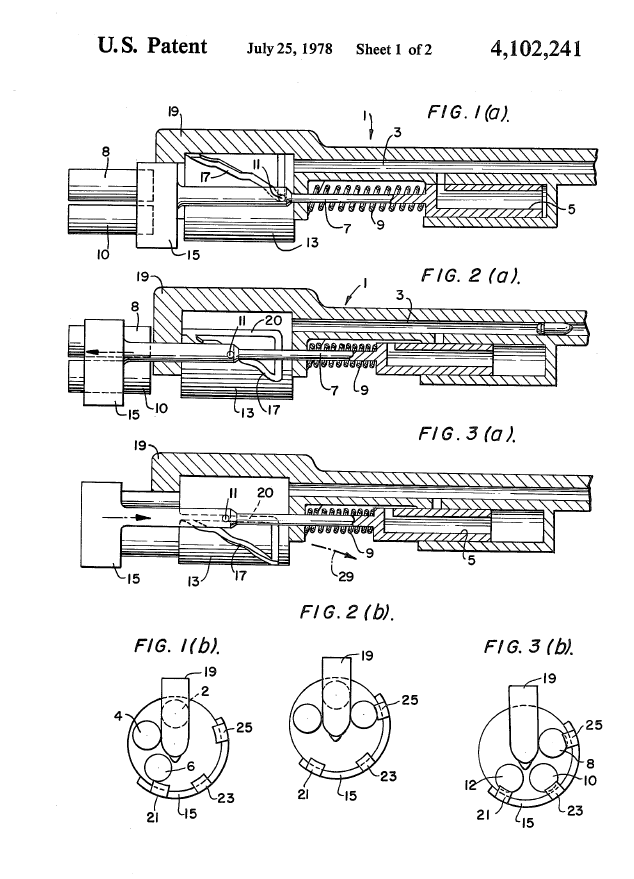
方案A的原理示意图
而方案B则采用有9个弹膛的对称转轮,有3个抽壳/抛壳位置,但均不与枪管同轴。不论在何时,转轮上总是至少有5个弹膛是空的。弹匣位于左侧,自动机在“发射”循环中只是在一段很短的距离上作前后往复运动,而在“开锁/再装填”循环中,自动机则在一段长得多的距离上来回运动。该方案从开始装填和武器待发(即3个弹膛装有实弹,弹膛1位于发射位置,弹膛4~9是空的)开始,整个自动循环过程大致如下:
击发1号弹(利用弹簧储存的能量);
自动机向后运动(利用火药气体能量);
2号弹部分定位,并将击针限定于自动机上(击发2号弹和3号弹时不用击锤);
自动机回复至前方位置,2号弹完全定位于发射位置(利用弹簧储存的能量和转轮的剩余动量)。2号弹击发。自动机又被推向后;
3号弹定位于发射位置,自动机回复至前方。3号弹击发。自动机再次被推向后,开始自动机的“长”行程循环;
从弹膛1、2中抽壳并抛壳,压缩复进簧。随后,自动机受缓冲器作用而停止运动。弹簧推启动机复进,装填4、5、6号弹。4号弹定位于发射位置,准备再一次扣压扳机;
重复上述过程,但有一不同之处,即4号弹定位于发射位置的同时将3号弹壳推入一个拉壳钩中。而后,当下一个“开锁/再装填”循环开始时,3、4、5号三个弹壳将一起被抽出和抛掉。

方案B的原型枪

另一种DCR原型枪,据说有9个弹膛,可能是方案B的后期原型

|
FRS概述 ◆ AAI XM19/XM70 ◆ DCR双循环步枪 ◆ TRW LMR ◆ 折叠弹系统 |
|
|
资料来源:The Gun Zone 国防工业出版社出版《国外轻型步兵武器》下册 |
2016-02-28 |
|
|






